


Visual Inertial Odometry
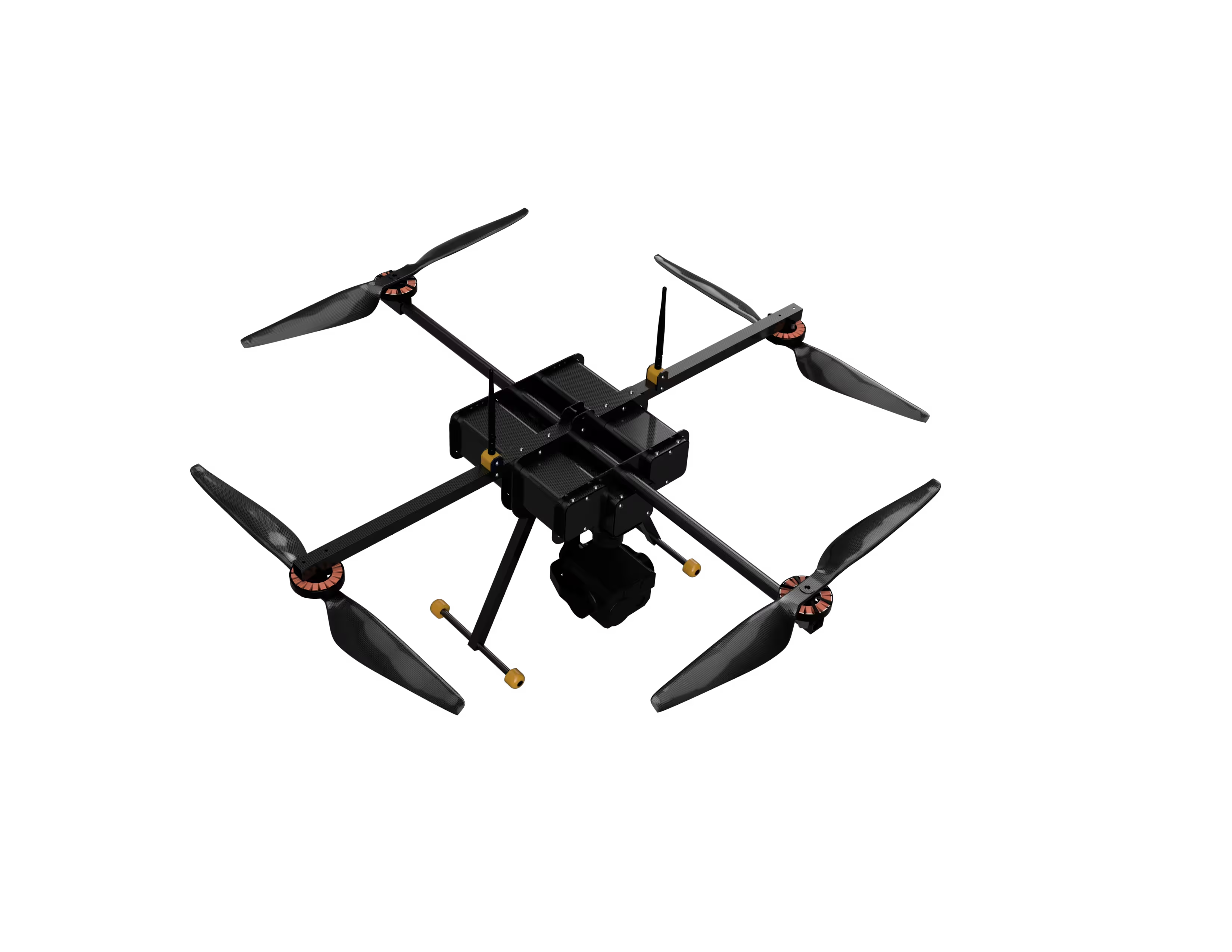
Visual Inertial Odometry (VIO) enables drones and autonomous systems to estimate position and orientation in 3D space by fusing camera imagery with IMU data.
Unlike GPS-only navigation, VIO works both indoors and outdoors. It is designed for GPS-denied or electronically contested missions where continuity of autonomous flight is critical.

VIO Program Specs
System Architecture
Performance Metrics
Navigation Core
The VIO core continuously matches drone camera frames with geo-referenced satellite references, then fuses those fixes with inertial data for stable state estimation without GNSS.
GNSS-Denied Operations
Designed for electronic warfare zones, dense urban canyons, where GNSS can be jammed, spoofed, or unavailable. VIO keeps autonomous flight functional in these denied environments.
Vision-Based Proxy System
Position estimates are sent to ArduPilot/PX4-compatible EKF pipelines as an external vision source through MAVLink, enabling drop-in deployment without custom flight controller firmware changes.
